
Az önce ne oldu? Manchester Üniversitesi’ndeki araştırmacılar, Özgürlük Anıtı’ndan veya Londra’daki Big Ben kulesinden çok daha yükseğe, 120 metreden fazla havaya uçabilen süper güçlü bir atlama robotu yapmanın kodunu çözdüler. Bu, “yalnızca” 33 metreye kadar ulaşabilen, en yüksekten zıplayan robot için mevcut dünya rekorunu elinde bulunduran kişiyle karşılaştırıldığında çok büyük bir sıçrama.
Bu hedefe matematik, bilgisayar simülasyonları, laboratuvar deneyleri ve elbette ülkü robotunun boyutunu, şeklini ve parça yerleşimini optimize etmek için bazı eski moda müdahalelerin birleştirilmesiyle ulaşıldı.
Mekanizma ve Makine Teorisi dergisinde yayınlanan araştırmaya göre, geleneksel zıplayan robotlar oldukça verimsiz olma eğilimindeler ve sadece yukarı doğru gitmenin yanı sıra istenmeyen hareketlerle de enerji harcıyorlar. Ya güç yaylı bacaklarını tamamen uzatmadan çok erken havalanıyorlar ya da momentumu azaltan yan kaymalar veya dönüşlerle rotadan sapıyorlar.
“Zıplayan robotlar halihazırda mevcut olsa da, bu zıplama makinelerinin tasarımında birkaç büyük zorluk var, bunlardan en önemlisi büyük ve karmaşık engelleri aşacak kadar yükseğe zıplamak. Tasarımımız yay tahrikli zıplama robotlarının enerji verimliliğini ve performansını önemli ölçüde artıracaktır,” diyor Manchester Üniversitesi Uzay Robotik Araştırma Görevlisi ve ortak yazar Dr. John Lo bir açıklamada.

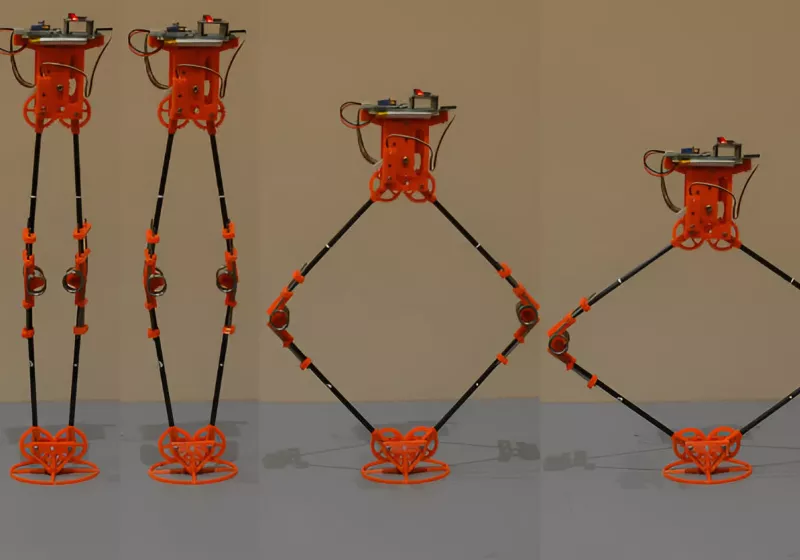
Araştırmacılar tamamen yeni bir yaklaşım benimsemeye karar verdiler. İlk olarak, hangisinin en iyi çalıştığını görmek için iki farklı zıplama mekanizmasını analiz ettiler – biri düz çizgi “prizmatik” piston tarzı bacak hareketine sahipken, diğeri döner kanguru tekmesi tipi eklemlere sahipti. Ortaya çıktığı üzere, her ikisinin de avantajları ve dezavantajları vardı.
Piston modeli, kalkıştan önce çok fazla alt yüklü kütle ile kendini aşağı çekiyordu ve bu da bir eylemsizlik gecikmesine neden oluyordu. Bu arada, dönen o dönme bacakları, yaylar tüm enerjilerini serbest bırakmadan önce botu fırlatarak enerji çalıyordu.
Ekip, her tasarımın en uygun unsurlarını birleştirerek en uygun noktayı buldu: Denge için ağırlığın çoğunu yukarıya kaydırın ve erken ayrılmayı önlemek için uzun, düz, doğrusal uzanan bacaklar kullanın.

Artık ekip fırlatmayı başardığına göre, bir sonraki hedef sıçramaların yönünü kontrol ederken aynı zamanda tek bir şarjla kalkış sayısını artırmaktır. Bilim insanları bunun, inişlerden elde edilen kinetik enerjiden yararlanılarak yapılabileceğini söylüyor; bu, robotun 100 metreden fazla bir yükseklikten yere çarpacağı düşünüldüğünde önemli olmalı.
Potansiyel uygulamalar çok büyük. Geleceğin zıplayan robotlarının, enkazın üzerinden atlayarak veya uzaylı arazileri üzerinden geçerek gezegensel keşifler için yeni yollar açarak arama ve kurtarma operasyonlarına yardımcı olacağını hayal edin. Ekip, alan için botun taşınmasını ve konuşlandırılmasını kolaylaştıracak daha kompakt tasarımlar keşfetmeyi planlıyor.